Hello! I'm Jeremy
My unique background combines advanced knowledge of Robotics and Software with substantial experience in Mechanical Engineering. I’m driven by the applications of robotics, machine learning, artificial intelligence, and autonomy, with my background providing me a distinct mindset and vision to create innovative and revolutionary technologies in these fields. With this in mind, I am always looking for opportunities to collaborate with other innovators.
I recently graduated with a Dual Master's in Robotics and a Master's in Computer Science from UPenn in May 2019. Prior to that, I graduated from Vanderbilt University with a Bachelor's in Mechanical Engineering in May 2017.
I am an accomplished innovator. At Endeavor Robotics, I worked daily improving the autonomous navigation system of UGVs. I also own a US Patent and am the first author on multiple in-press peer-reviewed journal publications from my work at NASA, and made substantial contributions to develop a bio-electronic product that has sold for over $2 million in revenue at bio-engineering startup Nervana.


Jeremy Saslaw
Robotics/Software Engineer at Berkshire Grey
MSE, Robotics, Universiy of Pennsylvania
MSE, Computer Science, University of Pennsylvania
BE, Mechanical Engineering, Vanderbilt University
Email:
Phone:
954-675-0028
Location:
Cambridge, MA

EXPERIENCE

2019
Robotics/Software Engineer
BERKSHIRE GREY
2018
Software Engineering
Advanced Development Intern
ENDEAVOR ROBOTICS
-
Enhanced the autonomous navigation system designed for unmanned ground vehicles (UGVs) and developed in ROS and C++
-
Implemented a dynamic local planner that efficiencly produces trajectories to track a Dijkstra path to a given waypoint
-
Debugged and resolved bugs throughout the layered costmaps, local planner, global planner, and other ROS nodes
-
Investigated additional sensor fusion beyond LIDAR to extend SLAM (Simultaneous Localization and Mapping)
2017
Patent Drafting Intern
MAYBACK & HOFFMAN, P.A.
-
Wrote provisional patents and created annotated figures for inventions of software, engineering, and consumer products
-
Improved proficiency in the above fields as well as in the design process by researching and writing about each invention
2016
Mechanical Engineering Intern
NASA
-
Developed US Patent #10,336,637 Closed-Loop Bioregenerative Water Purification System to replace the current system used on the International Space Station and to be applied towards sustainable Mars applications - jointly owned by NASA
-
Lead author on multiple in-press peer-reviewed journal publications under NASA's New Technology Reporting system
-
Invented proprietary system by investigating various water purification techniques and taking into account micro-gravity
2015-2016
Junior Mechanical Engineer
NERVANA, LLC
-
Presented new product NERVANA at 2016 Consumer Electronics Show (CES) in Las Vegas, which won Techstars "Lifestyle and Digital Health" Competition
-
Performed substantial roles in developing the company's first product, which has sold for over $2 million in revenue
-
Led interactions with various manufacturers overseas, ensuring correct part manufacturing and industrial engineering techniques
-
Contributed to product design and patent development at board meetings, assisting in the product development process
-
Led and oversaw the start of a Brand Ambassador Program with 9 Campus Representatives at various universities
EDUCATION

2017-2019
MSE in Robotics
MSE in Computer Science
UNIVERSITY OF PENNSYLVANIA
-
GPA: 3.63/4.00
-
GRASP Lab (General Robotics, Automation, Sensing & Perception)
-
ROBO Courses: Integrated Intelligence for Robotics, Learning and Robotics, Mechatronics, Advanced Robotics, Model Predictive Control, Performance & Design of UAVs, Engineering Entrepreneurship
-
CIS Courses: Operating Systems, Networked Systems, Algorithms, Machine Perception, Artificial Intelligence, Machine Learning, Modern Data Mining (Wharton)
VANDERBILT UNIVERSITY
-
GPA: 3.50/4.00
-
Minors: Scientific Computing, Materials Science
-
Relevant Courses: Machine Analysis/Design, Instrumentation, System Dynamics, Data Structures & Algorithms, Electronics, Senior Design, Heat Transfer, Thermodynamics, Fluid Mechanics, Mechatronics, Scientific Computing Toolbox, Finite Element Analysis (FEA), Mechanics of Materials, Circuits, Statics, Applied Behavioral Science, Quantum Mechanics, Math Modeling
2013-2017
BE in Mechanical Engineering
Spring 2016
Study Abroad (IES Madrid)
UNIVERSIDAD CARLOS III DE MADRID
-
Madrid, Spain
-
Relevant Courses: Industrial Automation, Production & Manufacturing Systems
TECHNICAL SKILLS

SOFTWARE
Python
C++
Matlab
ROS
Microcontrollers
C
Data Analysis/Mining (Python, R)
Linux, Mac, Windows
P4
ROBOTICS
Path Planning (Dijkstra, A*, RRTs)
SLAM
Quadcopters
Layered Costmaps
Vision - LIDAR
Autonomous Navigation and Vehicles
Machine Learning + AI
Reinforcement Learning - Markov Decision Processes (MDP)
SVM
Naive Bayes
Neural Nets
HARDWARE+ DESIGN
3-D Modeling
SolidWorks
PTC Creo (Pro-E)
Prototyping
Finite Element Analysis - ANSYS
KEY PROJECTS

Improved Navigation for Service Robots towards Full Autonomy
(click for report)
-
Mapped large areas using Google Cartographer
-
Integrated different map data with CouchDB server
-
Improved elevator navigation with transitions between different floors where the robot interacts with users in elevators
-
Improved map transitions between different buildings/floors
-
Integrated improvements into an improved Tourbot application
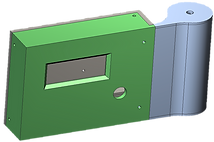
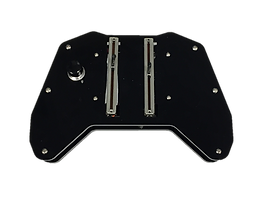
Fighting Robot for Multiplayer Mechatronic Robot Arena
(click for report)
-
Constructed a mobile differential drive robot controlled via WiFi and a custom-made controller
-
Utilized 3 microcontrollers and C/Arduino/Interrupts to operate motor drivers, sense incoming light's frequency, display health received from central router, operate servo motor to hit opponents, and detect and display contacting another robot

First minute of video shows battle, second minute shows functionality of robot.
Machine Learning Application for Top Daily NBA Player Selection
(click for paper)
-
Mined raw NBA data from 2015-18 to create features and predict for each player per day who would be the top performers
-
Implemented in Python
-
Used Support Vector Machines (SVM)
-
Statistically significant success!

Quadrotor control + 3D Trajectory Generation with Vision Based Pose/Velocity Estimation
(click for paper - Part 1)
-
Programmed each package from scratch in Matlab
-
Part 1 - Dijkstra and A* path planning, geometric and non-geometric controllers, trajectory generation and collision avoidance
-
Part 2 included vision based pose and velocity estimation with April Tags, corner extraction and tracking, Extended Kalman Filter and RANSAC

Created Operating System
(click for documentation)
-
Custom FAT File System and Kernel Scheduler
-
Integrated file system and user/kernel functionality into a shell with job control, file manipulation, custom commands, etc.


Remote Manipulator Arm (Waldo)
-
Designed and built a two degree of freedom sensing arm that can be used to control an integrated identical second arm
-
Built joints that sense position via acrylic optical quadrature encoders designed in SolidWorks with IR LEDs and sensors
-
Utilized a Teensy 2.0 (ATmega32U4) microcontroller to control the logic via code written in C
Planning Collision Free Trajectories through a Cluttered Environment for a Lynx Robotic arm
(click for report on RRTs)
(click for report on Potential Fields)
-
Designed two efficient path planning algorithms in Matlab via Rapidly-exploring Random Trees (RRTs) and potential fields
-
Achieved a 100% success rate in each case of avoiding four 3" diameter obstacles with an average run time of 0.34 seconds
NASHWHEELS - Senior Design Project
(click for paper)
-
Sponsored by Max Mobility
-
Enhanced an existing two-wheel self-balancing wheelchair to increase accessibility and safety for handicapped individuals
-
Designed, built, and verified an auxiliary mass displacement system to simulate and replace user leaning
-
Modified circuitry of Segway base to integrate steering and mass displacement control via joystick
Mechatronic Bop It Game
(click for paper)
-
Assembled various sensors and actuators (notably LCD screen) housed in custom 3-D printed parts controlled by Arduino
Rapidly-expanding Random Trees (RRTs)

Potential Fields